
Eingebettet am Campus Inffeldgasse, erforscht man hier gemeinsam Regelalgorithmen, die den richtigen Pfad und die richtige Geschwindigkeit für autonome Fahrzeuge berechnen.
Am Forschungs- und Entwicklungszentrum Virtual Vehicle wird an zukunftsträchtigen Fahrzeugkonzepten sowohl für die Straße als auch die Schiene gearbeitet. Das Kompetenzzentrum, das über das COMET-Programm der Forschungsförderungsgesellschaft FFG gefördert wird, beschäftigt momentan rund 200 Mitarbeiterinnen und Mitarbeiter, die sich vor allem mit der Entwicklung von leistbaren, sicheren und umweltfreundlichen Fahrzeugen beschäftigen.
Motorway-Chauffeur
Daniel Watzenig leitet den Bereich Electrics/Electronics & Software am Kompetenzzentrum und ist Mitarbeiter am TU Graz-Institut für Elektrische Messtechnik und Messsignalverarbeitung. Seit 2014 beschäftigt er sich im Projekt „TECAHAD – Technology Concepts for Advanced Highly Automated Driving“ mit dem automatisierten Fahren auf der Autobahn. Im vergangenen Jahr brachte er mit Martin Horn, Leiter des Instituts für Regelungs- und Automatisierungstechnik, das Buch „Automated Driving– Safer and More Efficient Future Driving“ heraus, das im Springer-Verlag erschienen ist.
Für den Teilbereich Pfadplanung ist Doktorandin Astrid Rupp vom Institut für Regelungs- und Automatisierungstechnik verantwortlich. Sie schreibt Regelalgorithmen, die selbstständig im Fahrzeug circa alle 100 Millisekunden den sichersten und schnellsten Fahrweg berechnen und umsetzen.

Das Projektteam rund um Astrid Rupp (rechts unten).
In der Praxis würde das beispielsweise so aussehen: Auf der Autobahn angekommen, gibt der oder die Fahrende die gewünschte Geschwindigkeit in den Tempomaten ein. Das Fahrzeug wird für die Fahrdauer versuchen, dieses Tempo zu halten, und muss dafür den geeigneten Pfad berechnen. Bereits im Vorfeld wurde dem System ein sicherer Minimalabstand zu den anderen Verkehrsteilnehmenden und der umgebenden Infrastruktur vorgegeben. Diesen gilt es nun ebenfalls dauerhaft einzuhalten. Regelmäßig sammelt das Fahrzeug über die eingebaute Sensorik Daten über die Umgebung, berechnet den besten Weg, überprüft die aktuelle Strecke und Geschwindigkeit, überholt selbstständig und passt die Geschwindigkeit den jeweiligen Gegebenheiten an.
In Echtzeit
„Fährt ein Fahrzeug zum Beispiel langsamer vor dem autonomen Fahrzeug, wird irgendwann der vorgegebene Sicherheitsabstand unterschritten – das System könnte also zum Überholen ansetzen. Ist nun aber der andere Fahrstreifen besetzt, würde bei einem Spurwechsel ebenfalls der Sicherheitsabstand unterschritten. Das Fahrzeug wird also entscheiden, die Geschwindigkeit erstmal zu reduzieren und möglicherweise später zu überholen“, erklärt Astrid Rupp die „Denkweise“ des autonomen Fahrzeugs. Dahinter liegen Ellipsenberechnungen und Ansätze aus der Formationsregelung, die auch in der Robotik verwendet werden.
„Fährt ein Fahrzeug zum Beispiel langsamer vor dem autonomen Fahrzeug, wird irgendwann der vorgegebene Sicherheitsabstand unterschritten – das System könnte also zum Überholen ansetzen. Ist nun aber der andere Fahrstreifen besetzt, würde bei einem Spurwechsel ebenfalls der Sicherheitsabstand unterschritten. Das Fahrzeug wird also entscheiden, die Geschwindigkeit erstmal zu reduzieren und möglicherweise später zu überholen.“
„Die bereits eingesetzten Parksensoren oder Spurassistenten funktionieren sehr ähnlich. Sie erkennen ebenfalls selbstständig, wenn ein Hindernis näherkommt, und reagieren mit einem Warnsignal. Wir wollen aber, dass das Fahrzeug selbstständig in Echtzeit den geeigneten Pfad berechnet und Schritte setzt, um mit der jeweiligen Situation umzugehen“, erklärt Daniel Watzenig. Und Rupp ergänzt: „In unserem System werden laufend verschiedene Fahrvarianten und Sicherheitskorridore neu berechnet, die sich an der aktuellen Verkehrssituation orientieren. Natürlich gibt es auch immer ein WorstCase-Szenario, sollte sich einmal ein anderes Fahrzeug nicht so verhalten, wie man es erwarten würde.“ Eine enorme Herausforderung für die Regelungstechnik.
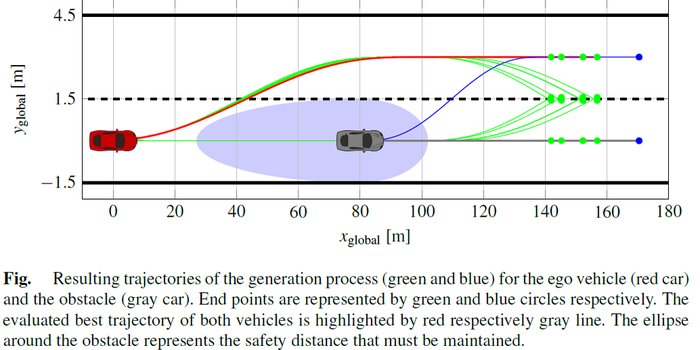
Die Planung innerhalb des Fahrzeugs: In der Abbildung will das autonome Fahrzeug ein anderes Fahrzeug überholen. Der eingefärbte Bereich ist der festgelegte Sicherheitsabstand, die rote bzw. graue Linie der ideale Fahrweg.
Erste Tests
Die Simulation am Computer ist bereits erfolgreich abgeschlossen. Momentan testet man mit Modell-Lkws im Labor und am Fahrsimulator. „Vor allem das Umbauen der Modellfahrzeuge ist immer ein sehr beliebtes Studierendenprojekt“, erzählt Rupp. Mit diesen Ergebnissen und den folgenden Publikationen wäre das Projekt für die wissenschaftliche Welt eigentlich abgeschlossen. „Für unsere industriellen Partner im Kompetenzzentrum brauchen wir aber einen ganz anderen Level. Bis zum Projektende muss das System so weit entwickelt sein, dass es in wenigen Jahren in Serie gehen könnte“, erklärt Watzenig. Dafür braucht es nun auch Tests mit realen Fahrzeugen in realen Fahrumgebungen. Diesen Schritt möchte man nun im kommenden Jahr machen. Parallel zur Forschungs- und Testarbeit wird bereits ein Ford Mondeo für Tests auf der Teststrecke umgerüstet und mit sechs Radarsensoren ausgestattet, die in Folge die Sinneswahrnehmungen des Menschen nachbilden sollen. Anschließend werden die Regelalgorithmen ins System eingespeist und mit speziell ausgebildeten Testpersonen am Steuer getestet.
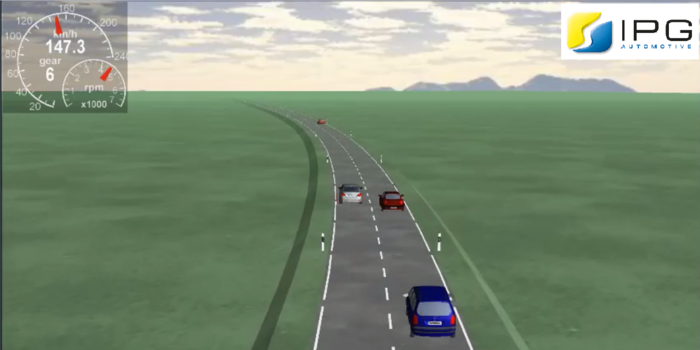
Simulation des Regelalgorithmus, der den richtigen Pfad für das autonome Fahrzeug berechnet.
Das Forschungsteam hofft, dass die neu entwickelte Technik anschließend von Unternehmen aufgegriffen und weiterentwickelt wird. „Um unsere Entwicklung auf die Straße zu bringen, sind wir nicht die richtige Stelle. Das müssen die Produktionsunternehmen dann umsetzen“, sagt Watzenig. Zumindest einmal ist ihm das bereits gelungen: „Manchmal erfährt man, wenn die eigene Entwicklung in Serie geht. Für meine Diplomarbeit habe ich damals zum Beispiel einen Regler entwickelt, der dann aufgegriffen wurde und wenig später in allen Fahrzeugen zu finden war. Das ist schon etwas Besonderes.“
Dieses Forschungsprojekt ist in den Fields of Expertise „Information, Communication & Computing“ und „Mobility & Production“ angesiedelt.