
Multibody dynamics
🚀 nominated
Rethinking practical engineering education
In the course Multibody Dynamics, student teams (three persons each) work on measuring and simulating mechanical systems. Using 3D-printed models, they abstract real-world motions, derive equations of motion using Newton-Euler, Lagrange of the second kind, and Jourdain’s principle, and simulate them with Python. The results are numerically integrated and compared to optical measurement data – recorded with smartphones and analyzed using software Tracker.
Highlight: The high level of agreement between simulation and reality demonstrates how accurately models can reflect practical systems. This innovative concept combines theory, practice, and modern technology – preparing students optimally for technical challenges.
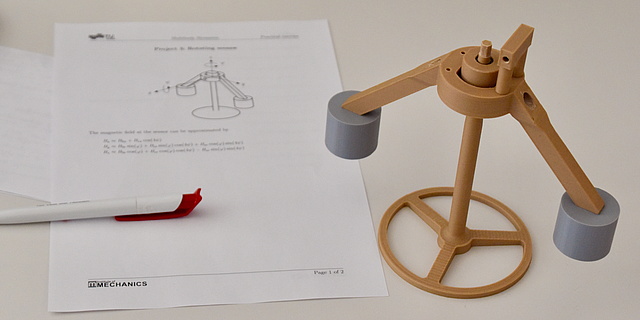
Task description
Each team receives a physical model, made of 3D-printed components, corresponding to their problem. The first step is to abstract the model and make key modeling assumptions. As a graduate-level course, it offers students significant autonomy: they assess which elements are essential and which effects can be neglected. The model parameters are measured, weighed, or estimated by the students themselves.
Calculation
The equations of motion are derived using three methods: Newton-Euler, Lagrange of the second kind, and Jourdain’s principle. Each group member is responsible for one method, with the goal that all three approaches yield the same result.
The analytical derivation of the equations of motion is performed using Python – a language chosen for its accessibility, clarity, and wide applicability. This enables students to gain experience with a programming language that is easy to use at home and increasingly in demand in industry.

Simulation
In the next step, the equations of motion are numerically integrated and simulated in Python. If the results from all three methods match, this indicates correct computations. The output is not only in the form of numerical data and graphs but also as a video of the simulated motion. This allows for intuitive verification: for instance, an incorrect sign in the damping term can lead to unstable behavior, which is immediately noticeable.

Measurement
Simultaneously, the physical model is optically measured. Students develop their own measurement setup and minimize sources of error by preventing unintended movements and avoiding optical distortions, ensuring the motion takes place in a single plane. The motion is then recorded using a standard smartphone. To facilitate analysis, colored markers are placed on the model. A high frame rate is particularly important for accurate measurement, so slow-motion recording is recommended. High resolution and image quality of the smartphone are beneficial but not strictly necessary.

Analysis
The motion analysis is carried out using the freely available software Tracker, which allows optical markers in a video file to be tracked. This enables students to continue experimenting independently at home.

Comparison
As a final step, simulation data are compared with measurement data. When parameters are chosen appropriately, a striking correspondence emerges, which becomes clearly visible in a direct video comparison. For many students, the highlight of the course is when theory and practice converge.
